
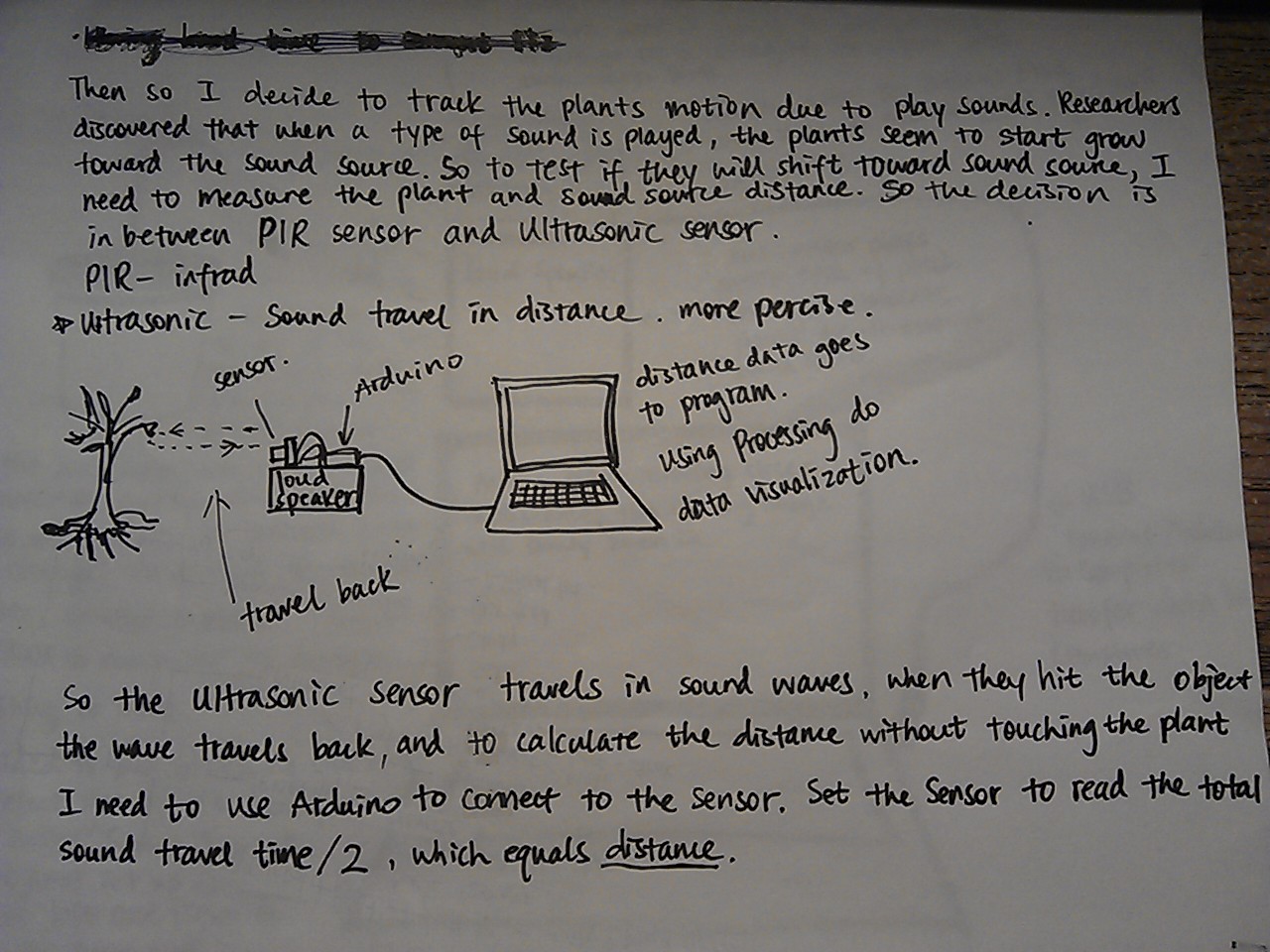

After searching many examples that people have done with mood/emotion, basically what they used is the motion sensor. There are many different types of motion sensors depends on what I need. The most common motion sensors are PIR, passive infrared Sensor; strictly it's a sensor detect body temperature, No energy is emitted from the sensor. The other one is called Ultrasonic sensor which detect measure distance, sends out pulses of ultrasonic waves and measures the reflection off a moving object. Im interesting in ultrasonic sensor because it might have some interesting results.
Material to be used:
arduino board

wires

ultrasonic sensor









the light in the middle of the sensor is a signal tell you that it is reading the distance

I set the LED light as a referencing signal light, when the distance is over 20cm, it fades off. once the distance 20cm, as the object gets closer and closer, the light gets brighter and brighter.

/* //~~~~~~~~~~Description~~~~~~~~~~~~//
Ping))) Sensor
This sketch reads a PING))) ultrasonic rangefinder and returns the
distance to the closest object in range. To do this, it sends a pulse
to the sensor to initiate a reading, then listens for a pulse
to return. The length of the returning pulse is proportional to
the distance of the object from the sensor. \
This distance variable is used to fade the LED proportional to the
distance of the object.
The circuit:
* +V connection of the PING))) attached to +5V
* GND connection of the PING))) attached to ground
* SIG connection of the PING))) attached to digital pin 7
* LED connected to pin 9 (PWM)
//~~~~~~~~~~~~~~~~~~~~~~~~~~~//
Created 3 Nov 2008
by David A. Mellis
Modified 30 Aug 2011
by Tom Igoe
Modified 25 Dec 2011
by Ritesh Kanjee
This example code is in the public domain.
//~~~~~~~~~~~~~~~~~~~~~~~~~~~//
//~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~//
*/
// this constant won't change. It's the pin number
// of the sensor's output:
const int pingPin = 7;
const int ledPin = 9;
int fadeValue, fadeValue2 ;
void setup()
{
// initialize serial communication:
Serial.begin(9600);
}
void loop()
{
//-------------Get-Distance-----------------------------//
// establish variables for duration of the ping,
// and the distance result in inches and centimeters:
long duration, inches, cm, cm2;
// The PING))) is triggered by a HIGH pulse of 2 or more microseconds.
// Give a short LOW pulse beforehand to ensure a clean HIGH pulse:
pinMode(pingPin, OUTPUT);
digitalWrite(pingPin, LOW);
delayMicroseconds(2);
digitalWrite(pingPin, HIGH);
delayMicroseconds(5);
digitalWrite(pingPin, LOW);
// The same pin is used to read the signal from the PING))): a HIGH
// pulse whose duration is the time (in microseconds) from the sending
// of the ping to the reception of its echo off of an object.
pinMode(pingPin, INPUT);
duration = pulseIn(pingPin, HIGH);
// convert the time into a distance
inches = microsecondsToInches(duration);
cm = microsecondsToCentimeters(duration);
//-------------End-Get-Distance----------------------------//
//-------------Fading-LED------------------------------//
if (cm<20) // If Distance is less than 40 cm then do the following:
{ // Maps the LED brightness inversely proportional to the distance
cm2 = 20 - cm;
fadeValue2 = map(cm2 , 0, 20, 0, 200);
analogWrite(ledPin, fadeValue2); // Writes the fadeValue to pin 9
}
else
{
analogWrite(ledPin, 0); //If distance is larger than 20cm then switch off
}
//-------------End-Fading-LED-----------------------------//
//-------------Debugging-------------------------------//
//For debugging purposes
Serial.print(cm);
Serial.print("in, ");
Serial.print(cm);
Serial.print("cm");
Serial.println();
Serial.print("Centi 2 :");
Serial.print( fadeValue2 );
Serial.println();
//-------------End-Debugging------------------------------//
delay(10); // Short Delay allows for smoother fading
} //End Loop
//-------------Functions-------------------------------//
long microsecondsToInches(long microseconds)
{
// According to Parallax's datasheet for the PING))), there are
// 73.746 microseconds per inch (i.e. sound travels at 1130 feet per
// second). This gives the distance travelled by the ping, outbound
// and return, so we divide by 2 to get the distance of the obstacle.
// See: http://www.parallax.com/dl/docs/prod/acc/28015-PING-v1.3.pdf
return microseconds / 74 / 2;
}
long microsecondsToCentimeters(long microseconds)
{
// The speed of sound is 340 m/s or 29 microseconds per centimeter.
// The ping travels out and back, so to find the distance of the
// object we take half of the distance travelled.
return microseconds / 29 / 2;
}
//------------End-Functions-------------------------------//
//End Of Program
---------------------------------------------------------------------------------------------
max patch

Figured out Max reads Arduino's serial port at last minute, The grey box at the bottom shows the distance during the time while i was testing the sensor.
No comments:
Post a Comment